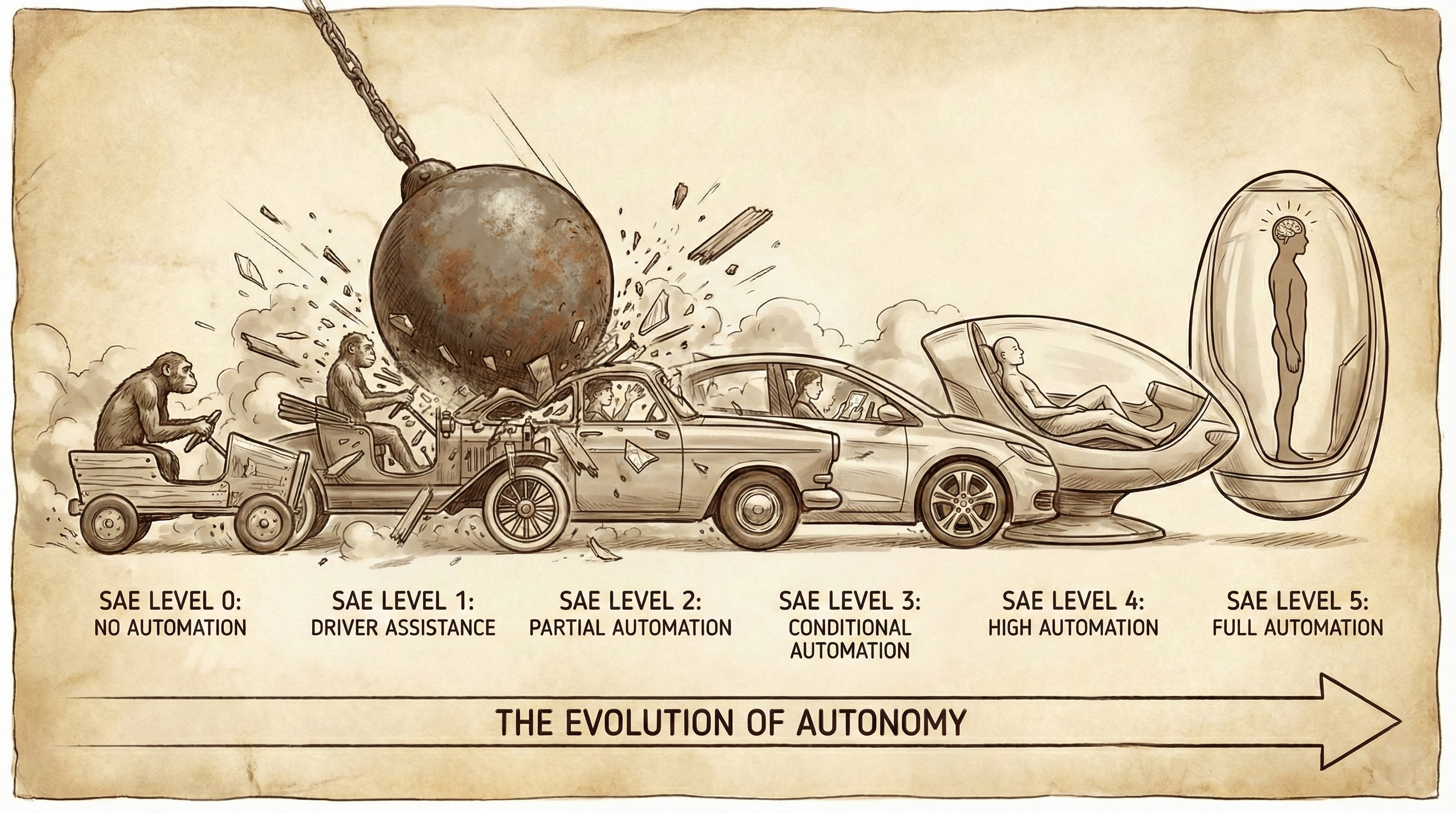
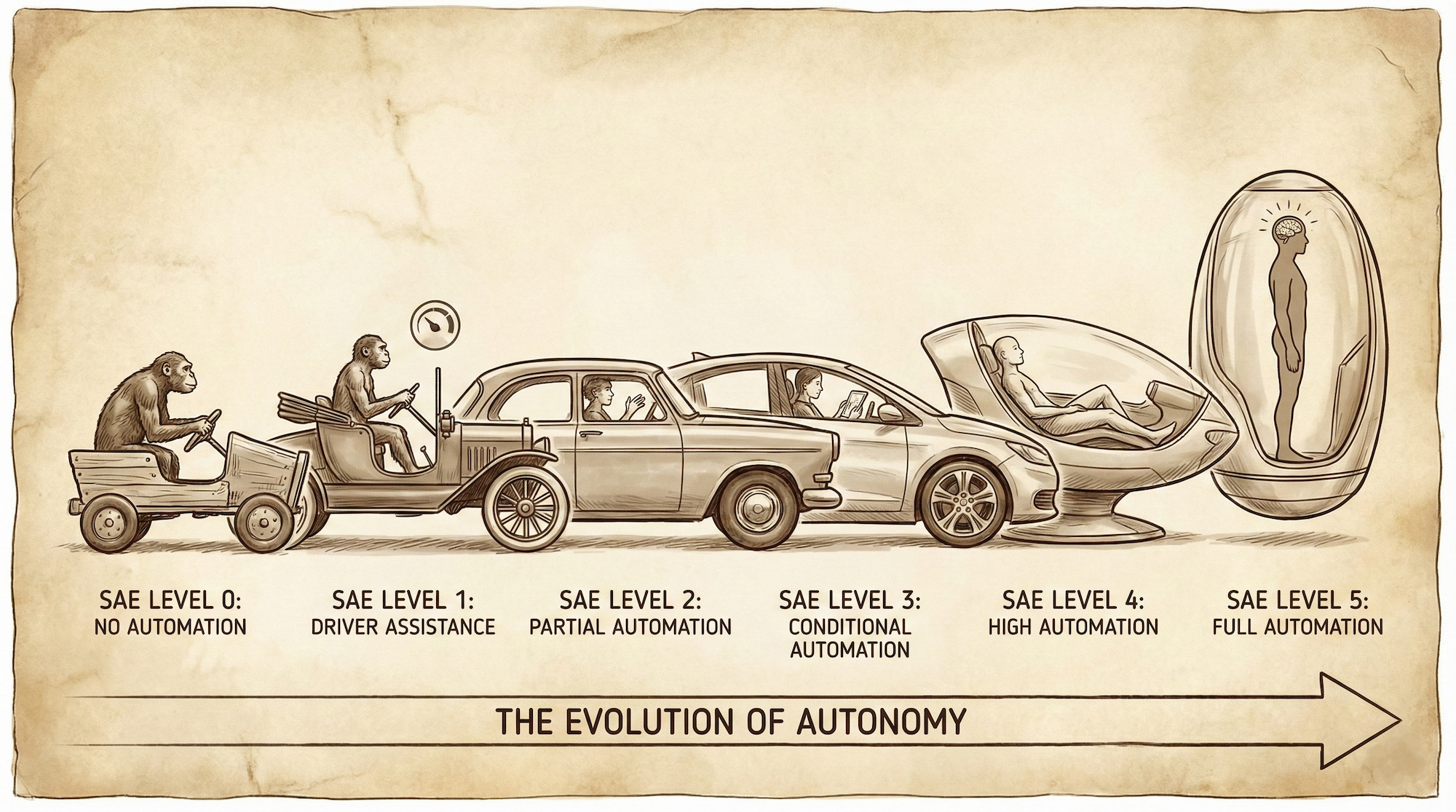
With the expansion of commercial, driverless robotaxi services in the US and China, where the number of metropolitan areas in which robotaxis will be in use is expected to double this year, the focus is shifting back to a classification system that makes less and less sense. We are talking about the SAE J3016 standard. This describes six levels – from Level 0 to Level 5 – of driving modes, ranging from completely human-controlled to completely machine-controlled. This standard was created by the Society of Automotive Engineers, or SAE for short, and came into force in January 2014.
This standard distinguishes between the degree to which a human driver is involved in controlling and supervising a vehicle. At level 0, humans are responsible for all tasks under all conditions. At level 5, the vehicle has control and responsibility for the vehicle under all conditions. And in between, there are gradations that are not simply a linear continuation.
Level 0: No automation. The human driver performs all driving activities, even when warning signals light up.
Level 1: Driver assistance. The vehicle can assist with steering or speed adjustment under certain conditions, but the human driver remains in complete control.
Level 2: Partial automation. The vehicle can take over steering or speed adjustments under certain conditions, but the human driver remains fully responsible for controlling the vehicle. Short formula: Hands off.
Level 3: Conditional automation. The car steers, adjusts speed, and monitors the road. The human driver is expected to take control if the system needs help. Short formula: Eyes off.
Level 4: High automation. The vehicle can decide pretty much everything, even if the human driver does not respond to a request for assistance from the system. Short formula: Mind off.
Level 5: Full automation. The vehicle takes over and replaces the human.
Anyone who deals with the topic of automated and autonomous driving quickly comes across this standard and tries to answer the question of what level the non-automated, automated, or autonomous car in front of them is at. This classification helps politicians, transport operators and managers, transport planners, taxi companies, and private individuals to better understand the topic. Unfortunately, this standard also leads to a number of misunderstandings that make autonomous driving seem unattainable or legal questions unanswerable, and fail to take many aspects into account.
The reason for this is quite simple. When these SAE levels came into force in 2014, there were already some driver assistance systems in place, but no autonomous cars. This meant that there was a lack of practical experience and knowledge about how autonomous vehicles would develop, as the development of the new powertrain for electric vehicles was also in its infancy, thus expanding the possibilities.
It also became apparent that the technological leap from Level 3 to Level 4 is so great that, from this point on, we are simply dealing with two different systems. It is also becoming clear that Level 5, i.e., fully autonomous driving, is not a necessary and, at the same time, almost impossible to achieve end goal. And Level 4 can be achieved more quickly than originally thought using hybrid methods. But more on that now.
Challenges
The SAE levels cause the greatest confusion by, on the one hand, giving apples and oranges the same status and, on the other hand, conveying an absoluteness that leaves little room for practical variations. This raises expectations that lead to disappointment or sets requirements that seem to push autonomous driving into the distant future.
The Better Candle
One example where expectations have been raised is Mercedes’ Intelligent Drive Pilot. This is a driving function that was the first technology to receive Level 3 approval in Germany, California, and Nevada. This means that these vehicles can initially be driven on the highway at 60 km/h, and recently also at 95 km/h, behind a lead vehicle without changing lanes in good weather, without the driver having to pay attention to the vehicle. The driver is allowed to read emails or a book and do other things, but must be able to take over at any time if the system gives them sufficient advance warning.
German manufacturers believe that with Level 3, they can slowly work their way up to Level 4. But that’s nothing more than continuing to optimize the candle while others are building the light bulb. Or, to use another example, it’s like building a ladder to the moon instead of a rocket. Why? Because you are familiar with ladder technology and can see the progress being made, whereas with rockets you first have to develop a completely new technology, where you won’t see any progress for a long time. In the end, however, those who have developed a rocket will win. Why am I saying this?

Such a Level 3 system does not need to know exactly what is in front of it and how it might behave differently when accelerating and braking. It does not need to understand whether the vehicle in front of it is a truck, a car, or a motorcyclist. The system also does not need to recognize moving objects such as pedestrians, animals, or wheelchair users, let alone traffic lights, turning lanes, or police officers. In other words, nothing that a vehicle might encounter on a road in urban or rural traffic. And it certainly does not need to know about their typical traffic behavior.
Classifying these objects and recognizing their behavior requires a much more complex software system that would be far too sophisticated for a Level 3 system. The leap from Level 3 to Level 4 is therefore a big one. Such a Level 3 system is more comparable to a better candle or a better sailing ship than to the incandescent light bulb or the steamboat that a Level 4 system would represent. It is a completely different architecture and complexity.
Companies such as Google, Zoox, and Cruise (as it was then) understood this early on and therefore did not bother with the development of a Level 3 system, but instead tackled Level 4 right away.
Level 4 for Easy parking and Complex City Driving
Another misleading product caused by SAE levels is Mercedes’ Intelligent Park Pilot. The Stuttgart-based company introduced this two and a half years ago. The Park Pilot allows the vehicle to park itself without a driver having to be in the vehicle.
Before driving into the garage, you reserve a parking space and drive the vehicle into a staging area, where the driver then gets out and the vehicle drives itself into the vacant parking space. For this to work, the garage must be equipped with the appropriate technology, as it takes control of the Mercedes and “steers” the vehicle.
To date, this technology has only been installed in one garage worldwide, namely the parking garage at Stuttgart Airport. However, Mercedes S owners have to fork out several thousand euros for this feature. This is despite the fact that people actually want to be dropped off at the airport terminal and not in a garage, from which they then have to walk to the terminal with their suitcases.
However, the big thing is yet to come: this very limited function counts as a Level 4 function according to the SAE levels, just like Waymo’s ability to drive in an entire city like San Francisco under (almost) all conditions. Various manufacturers from China (BYD, Xpeng, Xiaomi…) and the US (e.g., Tesla) now offer their own automated parking functions that do not require any additional technology to be installed in parking lots and parking garages.
However, the SAE levels’ definition gives the impression that this is a car with Level 4 capabilities, such as Waymo’s robotaxis.
Findings
These few examples already show how limited the SAE levels are and how unhelpful they are. Since 2014, not only has experience been gained with the first commercial driving services, but a far-reaching switch to a new powertrain has also been achieved, opening up new possibilities that the SAE levels did not take into account due to their rather narrow approach.
Today, common skateboard platforms for electric vehicles allow for a wide variety of forms of mobility that did not exist in 2014. Delivery vehicles ranging in size from coolers to trucks, passenger cars that resemble today’s standard vehicles, or forms such as single-seaters to completely new shuttles and cabin scooters that did not exist before. Buses and self-driving stores are also in development, the latter of which did not exist before. Where these vehicles are on the road is also in flux. The spectrum now ranges from roads to sidewalks.
We are only at the beginning, and the future will bring a few surprises, as we can already see from a new form of mobility that benefits from previous developments: humanoid robots. These can move not only in public spaces, but also in buildings themselves, or even in moving vehicles. And they can perform tasks that were previously left to humans. Autonomy takes on a broader meaning here.
You don’t need level 5.
To put the headline into perspective, I will just say that it would of course be wonderful to have a Level 5 system. With this, you no longer need a human driver; the vehicle can maintain control at all times and under all conditions. But in practice, this is not possible for humans either. Paved roads, dirt roads, and roads without pavement are driven on by humans today, and yet they still occasionally get stuck and need help to continue on their way. A muddy dirt road, a flooded road or one blocked by cargo or fallen trees, a rock protruding too far from the ground on which the vehicle gets stuck, deep sand, or simply unexpected and dense vegetation have already immobilized many vehicles, which could only be rescued from their predicament with a lot of human help.
Level 4 is here earlier and differently than expected
As we are already seeing with Waymo and other robot taxi fleets, Level 4 is perfectly adequate for a functioning service. In the combination of teleassistance and teleoperation described here, autonomous cars from Level 4 onwards can already be sufficient. Situations where a teleassistant or teleoperator needs to intervene are not necessarily visible to passengers in the robot taxis. Each such situation is recorded and used to train the Level 4 system. This reduces the number of such cases and, consequently, situations that require intervention by teleassistants or teleoperators.
Level 4 can also be very limited or wide open. Vehicles on a small company premises, where specialized personnel are moving around, access is controlled, and traffic conditions are clearly defined, can be set up very quickly and are already commonplace today. On a larger scale, an Operational Design Domain (ODD) can be extended to entire cities and metropolitan areas with much greater complexity, as we know from Waymo’s robot taxi fleet in the San Francisco Bay Area, which stretches from San Francisco to San Jose, connecting small towns in between via highways, urban roads, and country roads.
Special infrastructure is not required
In Europe in particular, it is expected that the implementation of autonomous driving will require a corresponding road traffic infrastructure in the form of smart roads. Nothing could be further from the truth. US manufacturers in particular are demonstrating that they can manage without V2X communication with traffic lights, intersections, road signs, or other road users. Expensive infrastructure measures are not a prerequisite for functioning Level 4 driving.
Quite the contrary. Once traffic is completely covered by autonomous vehicles, it is estimated that 90 percent of traffic lights and road signs can be removed. Read more about this in this article.
Other distinctions are more important
Which criteria are most helpful for transportation planners, taxi operators, regulators, politicians, or transportation companies when discussing autonomous vehicles and the current state of affairs?
Here are a few questions that need to be answered:
- How comfortable is the ride?
- What is the intended use? Vehicle type and task (e.g., passenger transport, delivery robot, shoe store, etc.);
- What is the intended area of use? Industrial sites, roads, dirt roads, inside buildings, etc.
- Under what conditions? Speed, weather, environment…
- How often does a human teleassistant/teleoperator need to intervene?
- What type of operation is planned? Private, public transport, commercial fleet, civil/military, emergency vehicle, medical transport…
- For which passengers? Disabled people, children, elderly people, commuters, women… (especially vulnerable groups)
- What are the safety statistics so far?
- Are infrastructure adjustments, such as smart roads, dedicated lanes, etc., absolutely necessary for your application?
- How do autonomous vehicles behave in mixed operation with other, manually controlled road users?
- …
As an operator, it would be more important for me to understand in which Operational Design Domain (ODD), i.e., for which area of application and under what conditions, an autonomous vehicle can be used.
- An industrial area with trained personnel and a clearly defined challenge?
- A city with a wide variety of road users?
- A rural area with many country roads with little traffic, but perhaps frequent wildlife crossing?
- Predominantly long distances on highways, where driving on access roads can be safely handled by human drivers (such as trucks that are driven from their location to the highway and then drive autonomously until they are taken over by a human driver again at the exit)?
- …
A new categorization instead of SAE levels
From now on, the focus should be on everything from SAE Level 4 onwards, and these should be subdivided and subjected to a catalog of criteria that allows autonomous mobility systems to be recategorized. Criteria could include the following:
- Weather conditions: All weather, good weather only,…
- Area: Everywhere, industrial areas, cities, rural areas…
- Space: Public spaces, inside buildings,…
- Route: Paved roads, dirt roads, sidewalks,…
- Transported object/subject: People, animals, non-perishable/perishable goods, medicines…
- Type of person: Children, disabled people, elderly people, women…
- Type of transport use: Public transport, private, robot taxi, delivery vehicle, truck, business premises, bus, sleeper car…
- Hybrid operation: without human intervention, teleassist, teleoperation (percentage of human/machine), full teleoperation, etc.
- Smart roads: sensors, traffic control devices, etc.
- Mixed operation capability: autonomous vehicles only, mixed operation with human-controlled vehicles, etc.
- …
The previous classification according to SAE levels 0 to 5 has proven to be of little help in correctly categorizing autonomous vehicles. Traffic planners, politicians, emergency services, transport operators, and regulators need this assistance in order to assess operational readiness, meet expectations, and make the necessary preparations for operation, costs, and safety.

This article was also published in German.

2 Comments