The coronavirus crisis also has some good sides to it. For example, many presentations that are normally only seen at conferences with expensive tickets can be found on the web for free and ahead of time.
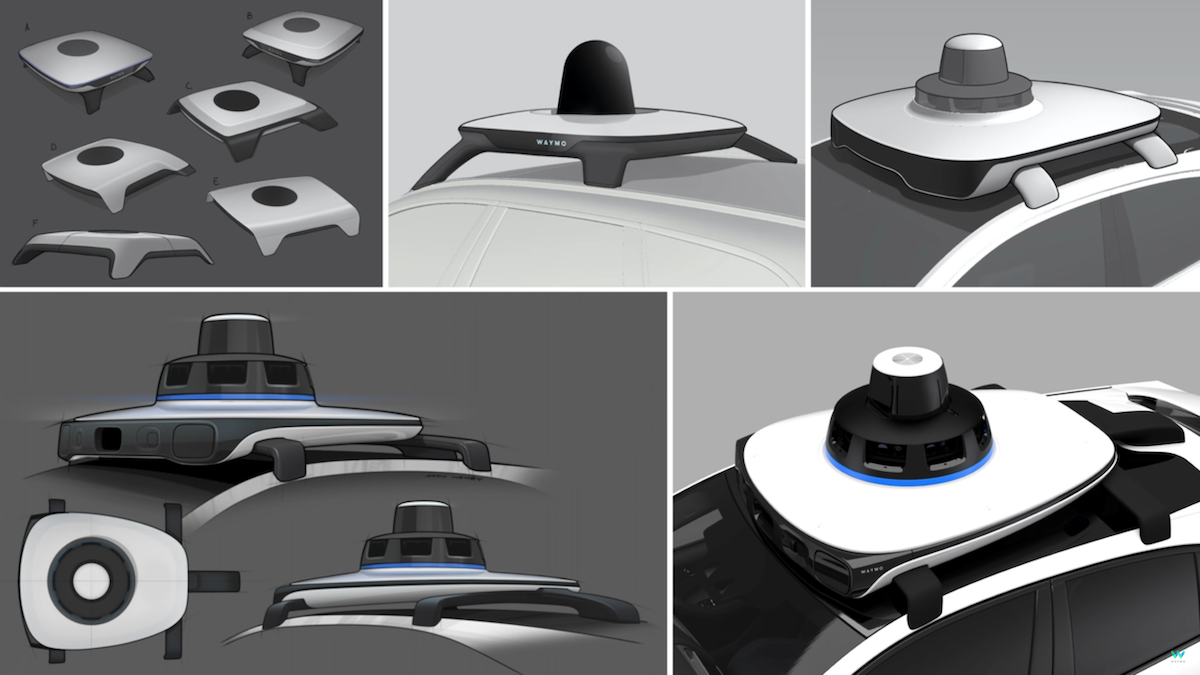
This was also the case with the presentation by YooJung Ahn, head of design at Waymo, who wanted to present at this year’s SXSW how Waymo approached the design of the software and hardware of the Waymo Driver, the self-drive technology, and what exactly were the individual motivations for design decisions. We have already discussed the Waymo Driver in a few articles here (like here and here), but now we get an insight from the inside.
Some of the findings are:
- more than 20 million miles (over 32 million kilometers) driven; more than 10 billion miles (16 billion kilometers) in the simulator; tested in more than 25 cities in the USA
- Sensors have a 360-degree view with a visibility up to 350 meters
- Use of the Waymo Driver for 4 purposes: Ride-Hailing, truck driving, deliveries, private vehicles
- Four design principles: simple, honest, approachable, delightful
- 29 cameras with overlapping field of view; equipped with cleaning system and heating
- Sensors were also tested in Death Valley, where temperatures of 50 degrees Celsius were
- Sensors designed to meet the stringent automotive requirements
- Waymo Driver developed for mass production
- Can be used on different vehicle platforms
- LiDAR dome has an LED display to communicate with waiting passengers
Currently this 5th generation of the Waymo Driver is being tested in the Bay Area and will then be installed into the Waymo One robotaxi fleet.
And here is the complete lecture by YooJung Ahn:
This article has also been published in German.

Hi ggreat reading your post
LikeLike