
While the investigations into the first fatal accident involving a self-driving car are underway, more and more details of the tragic incident are surfacing, Those details are not yet clarifying who’s to blame or how the accident could have been prevent.
On Sunday at around 10pm local time a self-driving test vehicle from Uber was traveling in autonomous mode on North Mill Avenue in Tempe, Arizona. Tempe is a suburb of Phoenix, located between Phoenix and Chandler. The vehicle was traveling with a speed of 40 miles per hour, five miles above the speed limit. The car was manned by a safety driver, who is supposed to take over control in case of an emergency. Both visibility and weather were good.
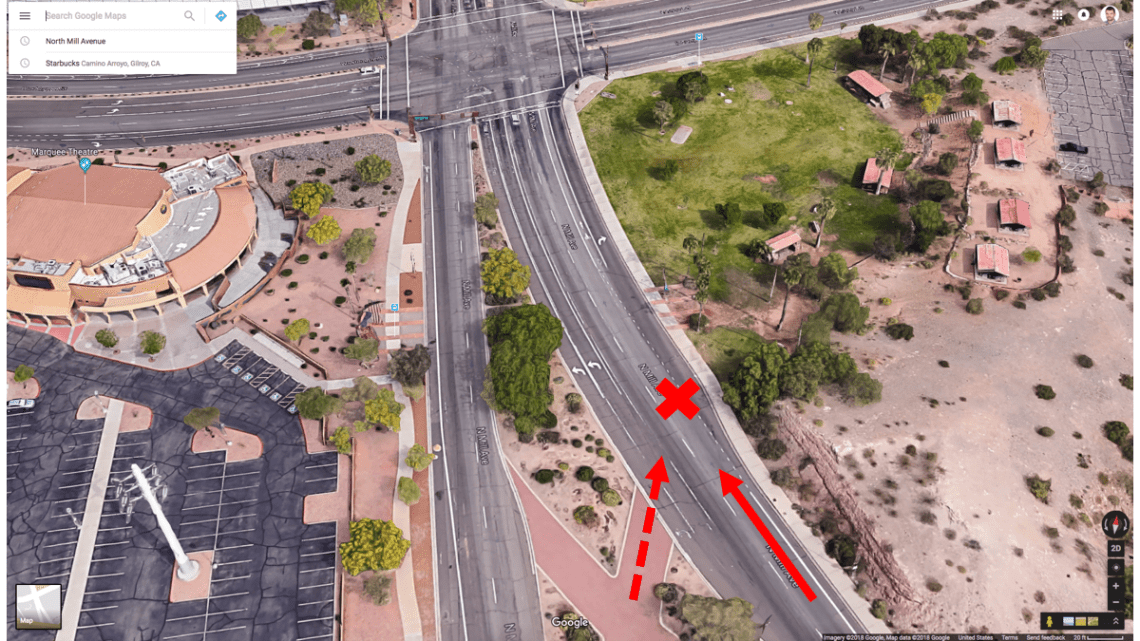
According to local police a 49-year-old woman was standing in the middle of the four lane avenue, pushing a bicycle loaded with plastic bags. She was coming from the middle section heading east. 100 feet (30 meters) north was a pedestrian crossing on the intersection North Mill Avenue and East Curry Road. The woman then suddenly stepped in front of the vehicle, was hit and thrown to the ground. She later died from her injuries. The Uber-vehicle only applied the brakes, once the accident already had happened. A sobriety test with the safety driver showed no DUI.




Suburbs like Chandler, Tempe or Mountain View are used as testing grounds by the manufactures because of their relatively orderly road and weather conditions. The mostly sunny weather offers ideal conditions for developing such a technology.
The question now is why the vehicle didn’t recognize or react properly to the person in the middle of the road? To answer that we have to know how a self-driving car sees the world. The Uber-vehicle – a Volvo XC90 – equipped with proprietary Uber-self-driving-technolopy comes with seven cameras, radar sensors and a Lidar.
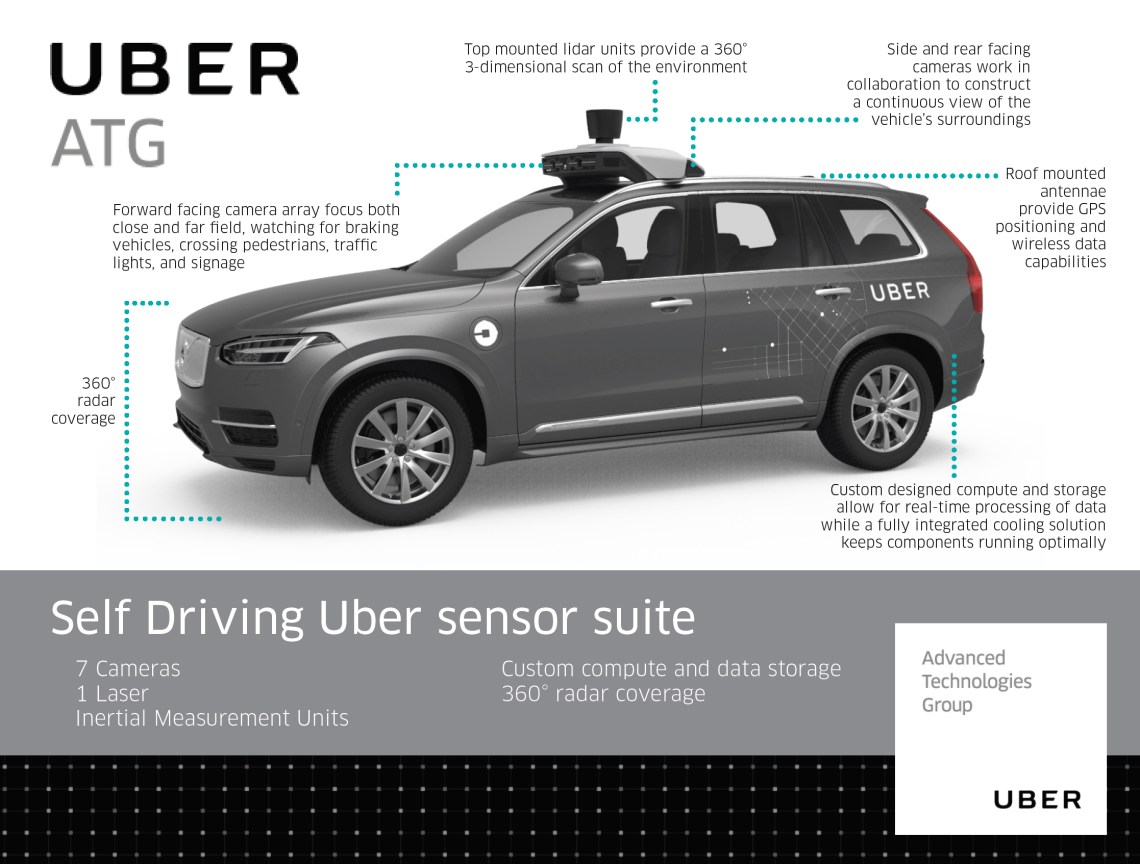
The cameras classify objects to allow the vehicle to react properly. Pedestrians, parked and driving cars, traffic signs, traffic lights or lane markings can be identified by the cameras. The lidar’s lasers create a three dimensional, 360 degree image of the world around the car. Lidars can see up to 600 feet (200 meters) and identify objects the size of a football helmet. The car’s sensors are doing complimentary tasks. While cameras can read traffic signs, Lidars create a 3D image. Ultrasound sensors recognize objects very close to the car, as required when parking the car, while radar sensors can detect object farther out, such as moving vehicles ahead of the car on the highway.
The situations that make difficulties are when the objects are not moving and being obscured due to bad light or weather. Cameras are having problems with contrasts during night, while rain and snow affect lidars with a lot of reflexions coming from rain drops and snow flakes.
Autonomous cars also follow the laws of physics. Objects moving unexpectedly in front of the car are as difficult to predict and react to as it is for human drivers.
Why the Uber car hasn’t seen the pedestrian can have multiple reasons, either technological or a misinterpretation of intent:
- the cameras couldn’t see the pedestrian due to bad light
- the pedestrian initially didn’t move and was detected; once she moved it was to late to react
- the shape of the pedestrian pushing a bicycle loaded with plastic bags could have been misinterpreted and not be in the underlying database of classified objects
- the vehicle wrongly expected that the pedestrian is yielding to the vehicle
- important sensor systems or the computer failed
It’s also not completely excluded, although with a low likelihood, that the victim had suicidal intent and used the opportunity.
Arizona laws generally give pedestrian the right of way. But they also have to follow the law by us crossing streets at marked intersections if possible. In fact pedestrians can be ticketed if they are crossing streets close to a street crossing, but outside it. This is known as jay walking in the US.
The speed of the vehicle, which was above the speed limit, is probably less likely a reason for the accident. Fact is that people in the US tend to drive a bit above the sped limit. Even self-driving cars are being programmed to adapt to that in order to prevent being regarded as a rolling obstacle by other cars. Cars going too slow are often creating aggressive reactions by others. Self-driving car developers have to find the balance between safety and complying with laws versus preventing to solicit aggressive reactions from other traffic participants.
Tempe police has seen all the videos recorded by the Uber-vehicle. Investigations are now conducted with the National Safety Traffic Board NSTB. Uber has temporarily suspended all tests with its over 100 vehicles in California, Arizona and Pennsylvania.
This article has also been published in German.

It is very good to see an objective, dispassionate analysis of this accident. Thank you! You avoided the two extreme arguments of the For AV and the Against AV “teams:” the For argument that every day not spent in converting the entire fleet to AV is a crime, and the Against argument that AVs will never be safer than humans. Thanks for just reporting facts and insights!
LikeLike
This article is wrong for speculating why the car hit the pedestrian. The police chief said the video clearly shows the pedestrian coming out of the shadows, not at crosswalk and difficult for man or machine not to hit the pedestrian. So far the pedestrian, not the car was at fault.
LikeLike
Just before this section of road is a speed limit sign that says 45 MPH. I believe the 35 MPH “fact” is not correct. So the Uber car was really going slower than the speed limit.
LikeLike